| MANIPOLATORI PARALLELI | |
|---|---|
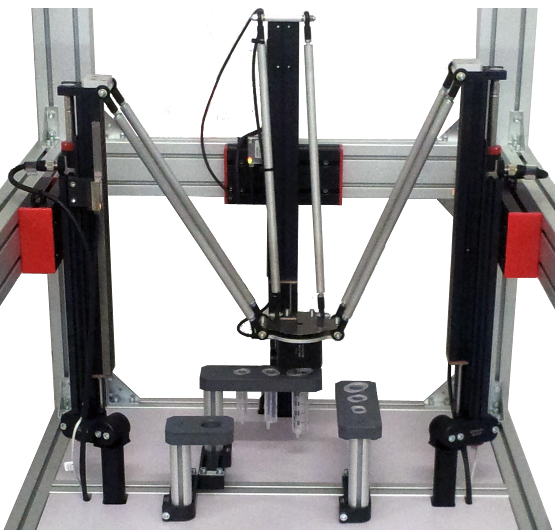 |
L'immagine riporta un esempio di un manipolatore parallelo a 3 gradi di libertà. Gli attuatori sono motori lineari tubolari dotati di trasduttore di posizione ti tipo encoder o sin/cos (in base ai prerequisiti del movimento). Gli attuatori sono fissati direttamente al telaio riducendo le masse in movimento e conseguentemente aumentando le prestazioni dinamiche del sistema. Il sistema di controllo può essere sia analogico sia digitale (basato su bus di campo). |
| MANIPOLATORI RIDONDANTI | |
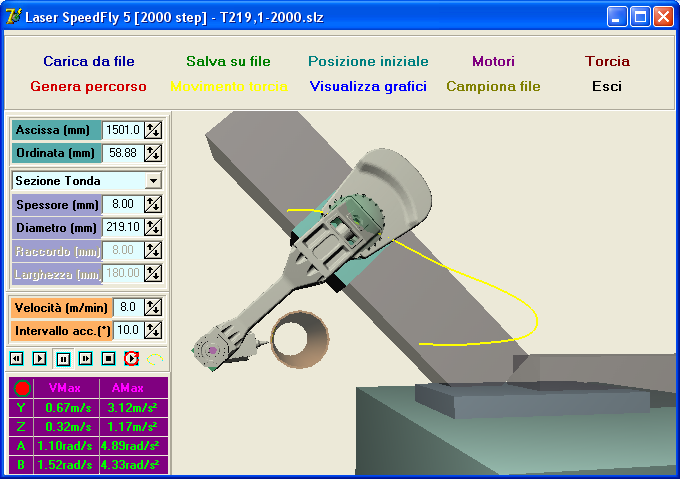 |
Un tipo particolare di architetture robotiche è riconoscibile nei manipolatori ridondanti nei quali il numero di attuatori è maggiore del numero dei gradi di libertà (gdl) della struttura. Questa caratteristica è spesso utilizzata per permettere all'organo terminale di percorrere un'unica traiettoria predefinita in modi differenti (per esempio allo scopo di evitare degli ostacoli piuttosto che consentire differenti ripartizioni dei carichi agli attuatori). Queste strutture richiedono un'attenzione particolare nella fase di progetto meccanico e di pianificazione del movimento. Crosstech S.r.l. è in grado di supportarVi nell'affrontare queste problematiche e, come esempio di un'applicazione realizzata, la figura di sinistra mostra una schermata di un software di simulazione dinamica di un manipolatore seriale ridondante a 6 gdl destinato al taglio al volo di tubi ottenuti da un ciclo di produzione continuo. Alcuni dei risultati ottenibili dalla simulazione sono le leggi di movimento ed i carichi richiesti agli attuatori che ottimizzano il processo determinando la traiettoria di taglio migliore che rispetti i vincoli funzionali. |
| MANIPOLATORI DIFFERENZIALI | |
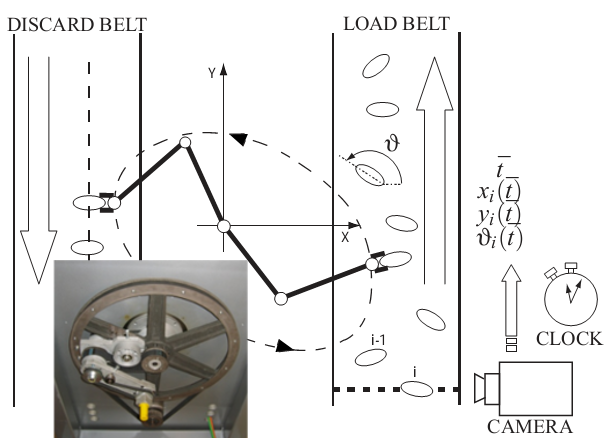 |
Uno dei vantaggi delle architetture robotiche a cinematica parallela consiste nel fissaggio remoto dei motori sul telaio ottenendo un sistema con masse in movimento contenute e quindi potenzialmente con prestazioni dinamiche superiori. Grazie ad un'attenta progettazione della catena cinematica Crosstech S.r.l. ha unito questo vantaggio ad uno spazio di lavoro maggiore (paragonato all'ingombro della struttura) realizzando un prototipo di un manipolatore seriale per la presa al volo di pezzi da nastro trasportatore. Questa soluzione è interessante anche per un potenziale risparmio energetico legato alla possibilità di mantenere in rotazione costante l'elemento strutturale con inerzia maggiore evitando le fasi cicliche di accelerazione e frenata tipiche dei pick & place tradizionali. |
| SISTEMI DI CONTROLLO DI COLLETTORI | |
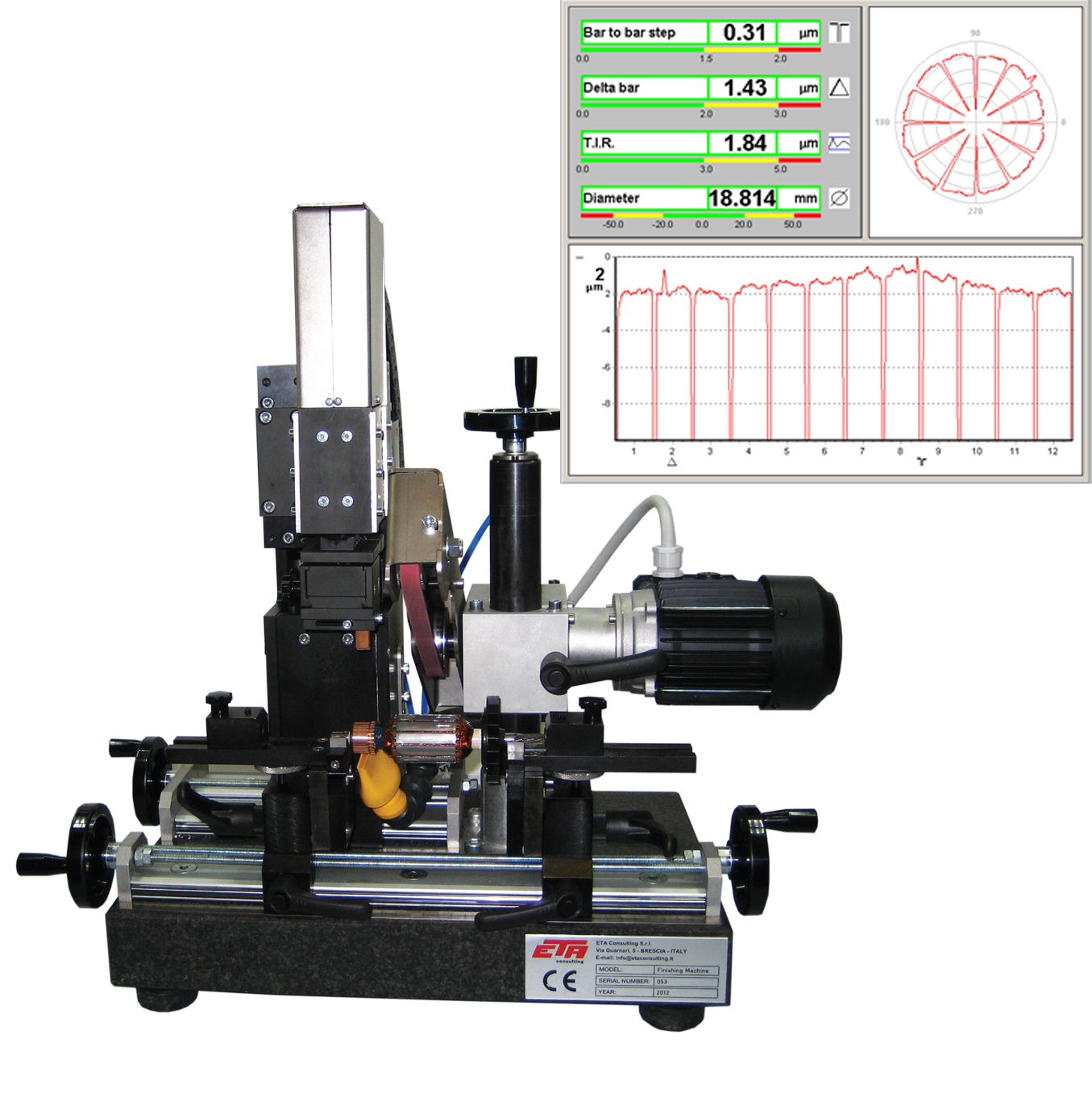 |
Crosstech S.r.l progetta e costruisce sia macchine per la finitura di collettori di motori elettrici tramite un processo innovativo e brevettato sia dispositivi per il controllo qualità dei collettori. |
Italian