| PARALLEL MANIPULATORS | |
|---|---|
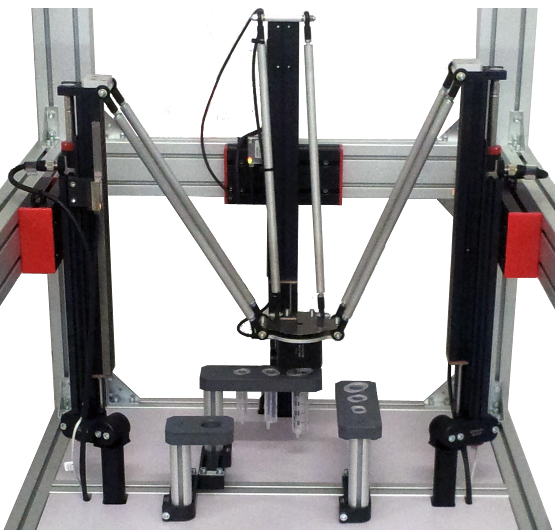 |
Crosstech S.r.l. designs, produces and installs several architectures of industrial manipulators complete of control systems and user interface devices. The picture on the left shows a prototype of a parallel 3 degrees of freedom manipulator with linear tubular actuators. This structure is scalable, reconfigurable, fast, precise and cost effective. Both analog or digital control over CANOpen® or EtherCAT® are available. User can program the device by means of a dedicated HDMI and/or with ISO programming. |
| REDUNDANT MANIPULATORS | |
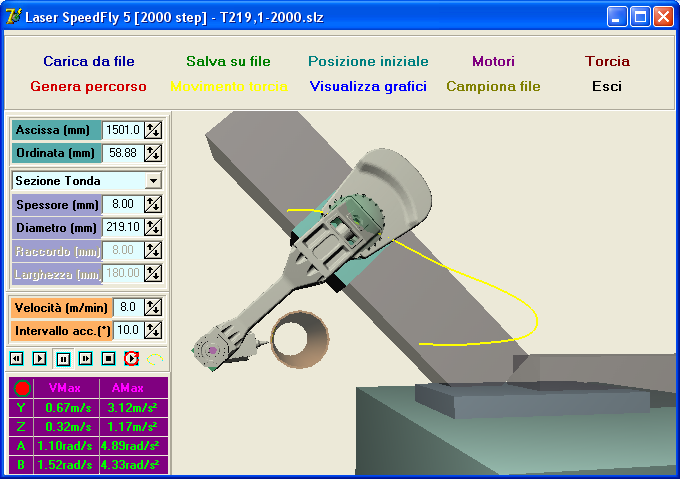 |
Redundant manipulators are special types of robotics architectures in which the number of actuators is greater than the robot degrees of freedom. The redundant degrees of actuations are frequently used to get the end effector follow a unique predefined trajectory in different ways (i.e. obstacle avoidance, loads repartition among actuators, etc). These structures require special focus on the design phase as well as during the motion planning. Crosstech S.r.l. can provide full support in solving this aspects: as an application example the picture on the left shows a screenshot of a dynamic simulation carried out on a 6 dof redundant serial robot for on fly pipe cutting in a continuum production process. Some of the simulation results are the actuators motion law and forces which are both otpimized along the cut trajectory. |
| DIFFERENTIAL MANIPULATORS | |
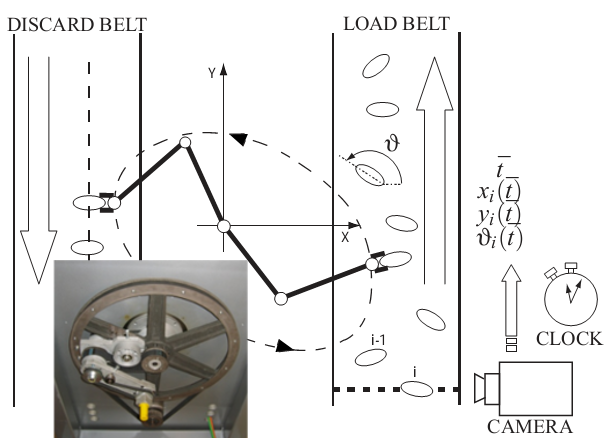 |
Parallel robots architectures are commonly more lightweight compared to serial structures expecially because actuators are often connected to the structure's frame and thus the overall mass in motion is quite low. With a careful design of a serial structure Crosstech S.r.l. has combined this aspect to a wide workspace realizing a serial robot prototype for on-fly pieces grasping from a conveyor belt. This solution also leads to energy savings because of the continuous rotation of the link with the biggest inertia avoiding cyclic acceleration and deceleration phases of classical pick&place structures. |
| QUALITY CONTROL OF MOTORS' COMMUTATORS | |
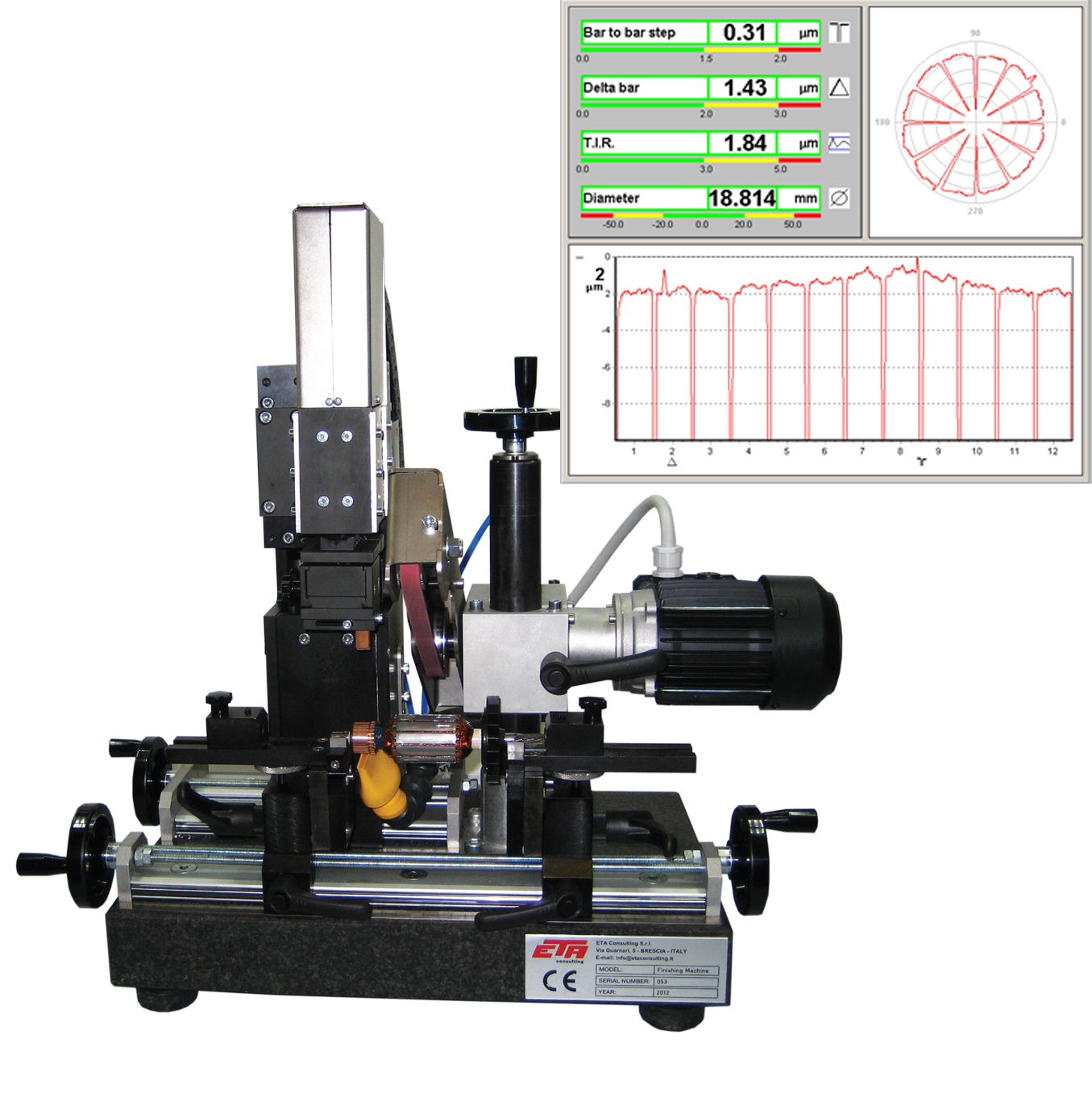 |
Crosstech S.r.l. designs and produces equipments for commutator working (innovative and patented process) and commutators quality control. |
English